10.1 Wiring of SDP Servo
3kW drive or less is as an example:
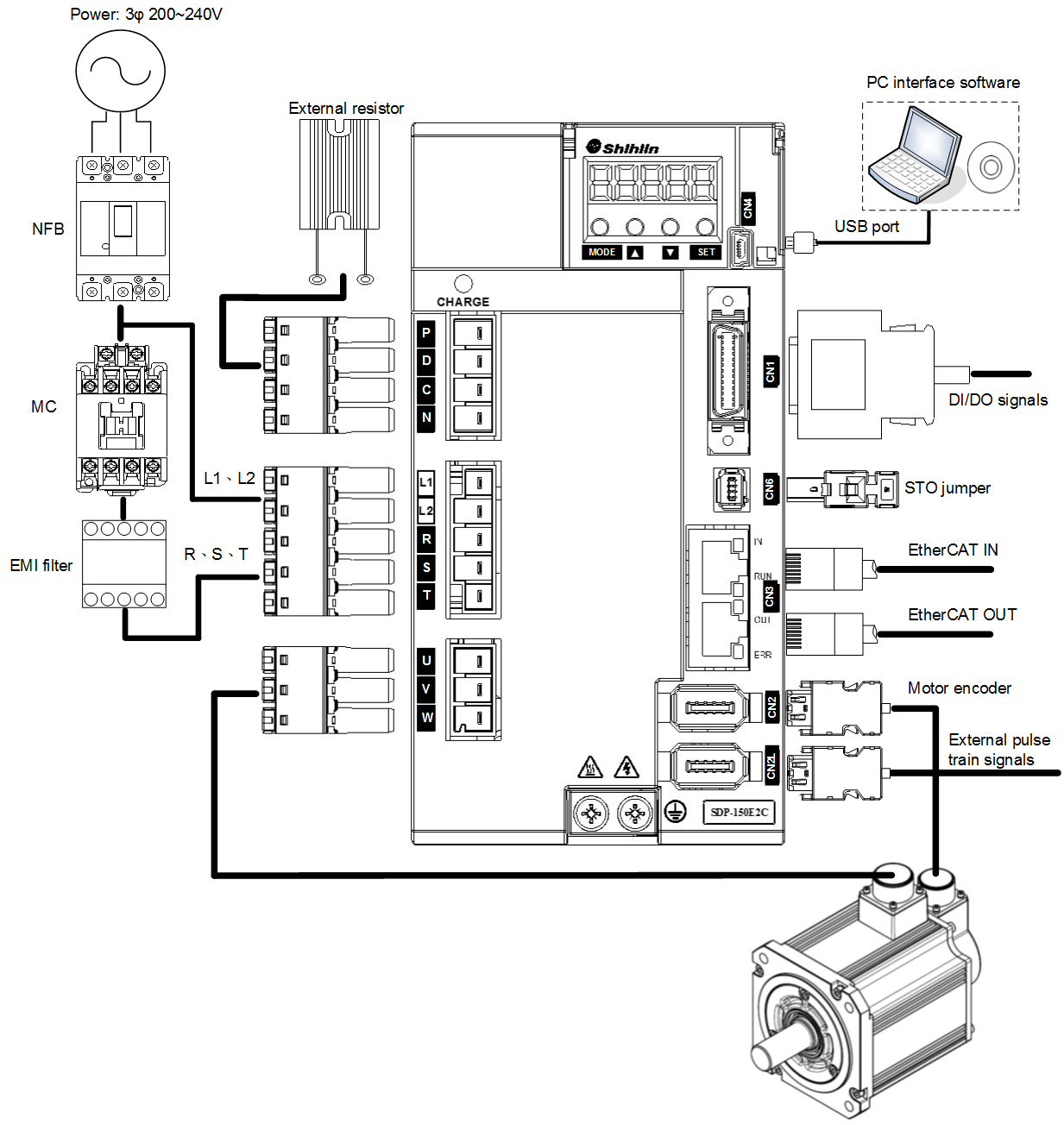
Note: |
If an external brake resistor is applied, please make sure that "P" and "C" connect to the resistor, and make "P" and "D" open. |
Connect the power cable of motor to the "U, V, W Output Terminal", and the ground cable to "Ground Terminal". Connect the encoder cable of motor to "CN2: Motor Encoder Socket". Connect the "L1, L2" and "R, S, T" to the AC 200~240 volt 50/60 Hz. Connect the "Ground Terminal" to the copper earth bar of this machine. And string together TCPU and SDP through "CN3: EtherCAT Input/Output Ports".
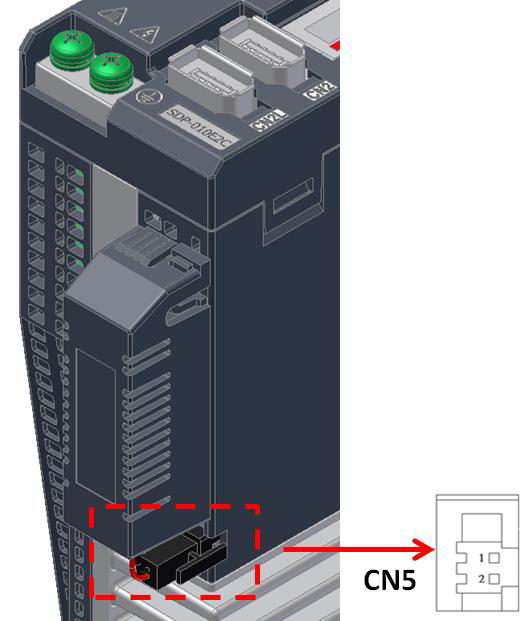
In order to record the encoder position when power off, the backup power for absolute encoder is necessary. SDP drive provides a socket, "CN5", which the backup battery box could plug in.